ROS是机器人操作系统,在业界颇受欢迎。其架构虽繁复却井然有序,功能既强大又多样。了解其架构原理和使用技巧,对于研发者和爱好者来说,具有极其重要的价值。接下来,我们将对此进行深入剖析。

整体框架概述


ROS框架构成了一套繁杂却井然有序的系统。从宏观角度来看,它犹如一张庞大的协作网络,各个部分紧密协作。在横向结构上,它包含了众多功能模块,每个模块承担着特定的职责,共同构成了一个协作的统一体。它的出现为机器人开发带来了便利,显著提升了开发速度,缩短了开发所需的时间。
这个框架不是固定不变的,它持续在进步和优化。科研人员与开发者持续深入研究和提升,让这个框架能更好地适应各种复杂环境和多变需求。现在,它在工业、科研和教育等多个领域都得到了广泛应用,已经成为机器人开发不可或缺的关键工具。
系统层次剖析

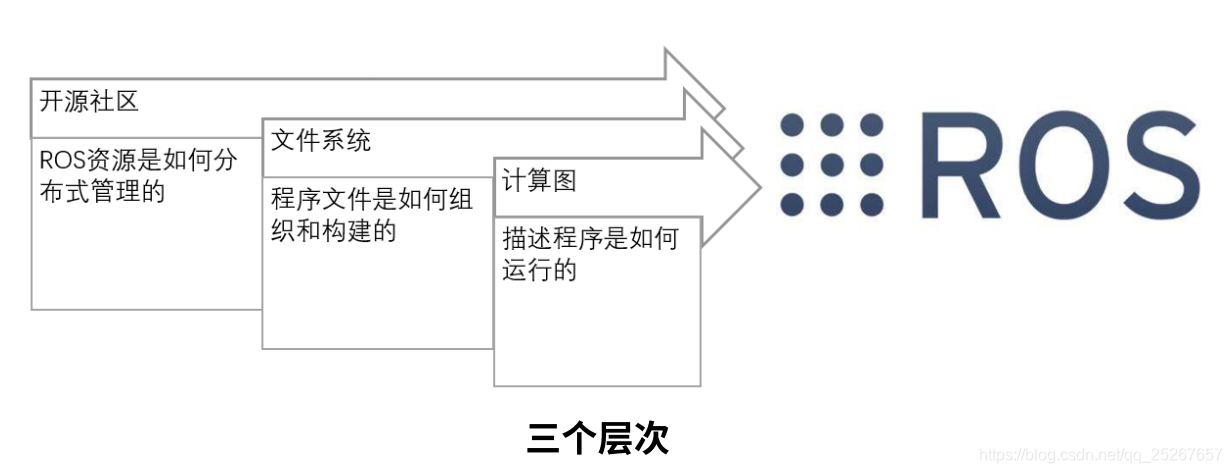
ROS系统在纵向结构上分明,底层为核心运行层,详细说明了程序的运行细节,它是系统稳定运作的根本。在这一层,各个组件紧密协作,共同保障系统的高效运行。
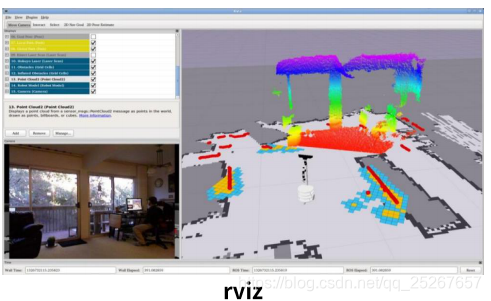
上一层是功能应用层,那是用户直接操作的界面。这里汇集了众多功能模块,它们展示了 ROS 强大的功能。借助这些模块,用户能够轻松完成视觉导航、运动规划等复杂任务,为机器人开发提供了多样化的选择。

核心概念详解

节点在ROS系统中扮演着基本执行的角色,相当于若干独立的小功能。每个节点都承担着特定的职责,众多节点共同协作,共同实现机器人复杂的操作。比如,在巡检机器人上,不同的节点负责图像的识别、路径的规划以及动力的控制等工作。

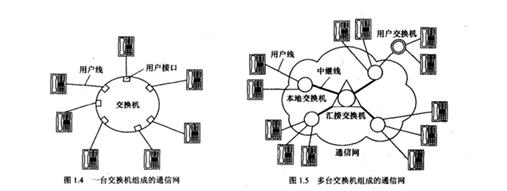
节点管理器犹如一位总调度,它负责掌控节点的启动、关闭以及协调事务。它能保证节点间沟通无阻,确保机器人系统能够稳定运作。若缺少了节点管理器的合理安排,节点间可能会陷入混乱,进而使得整个系统无法正常运转。
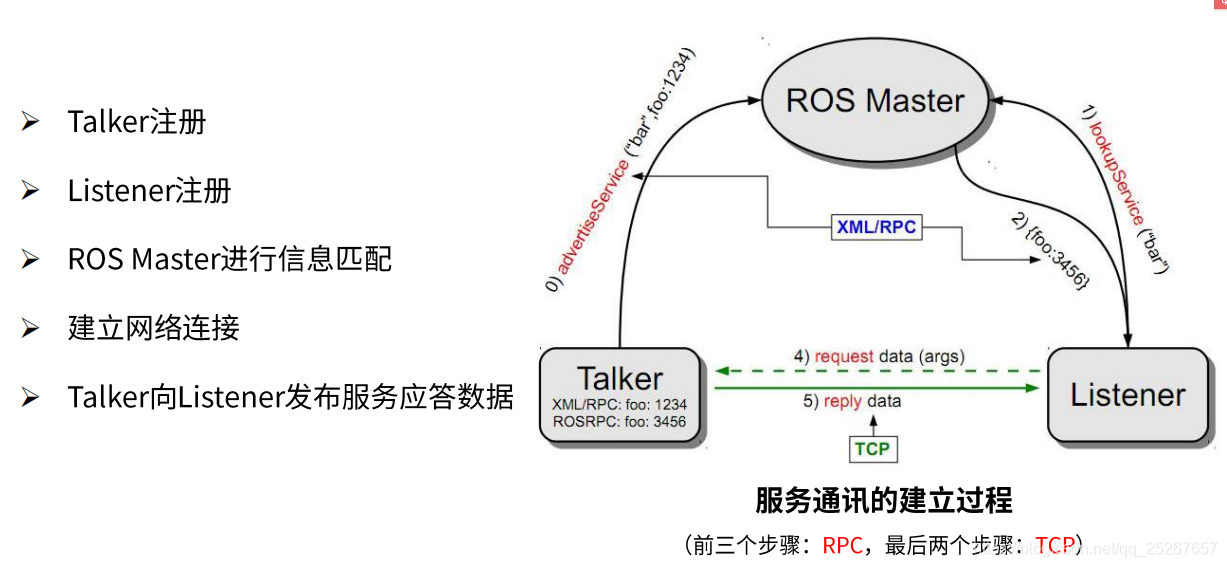
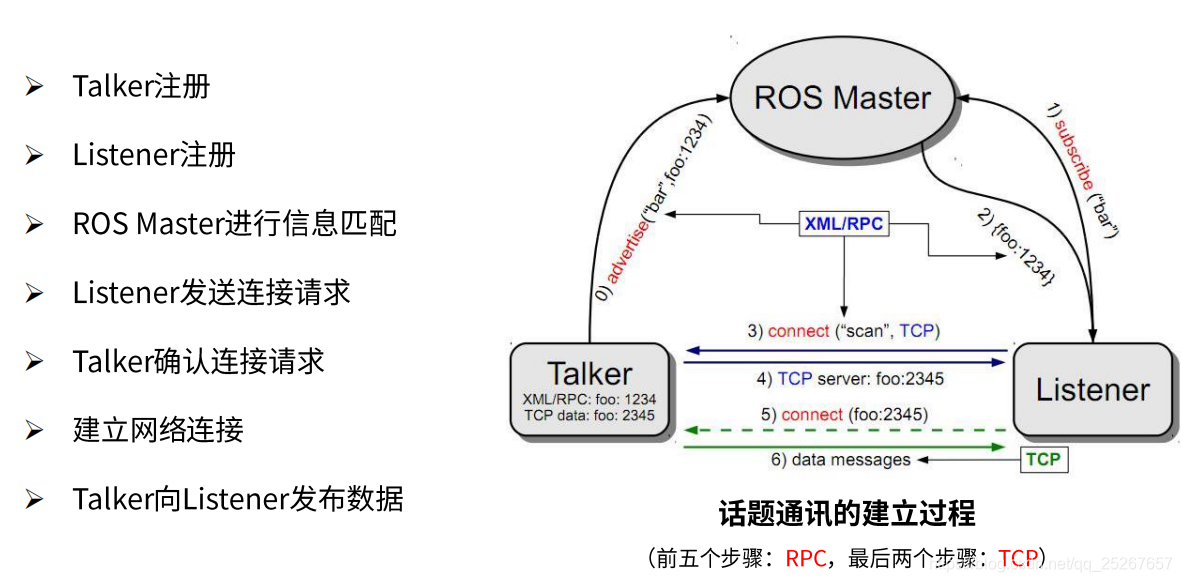
通信类型介绍
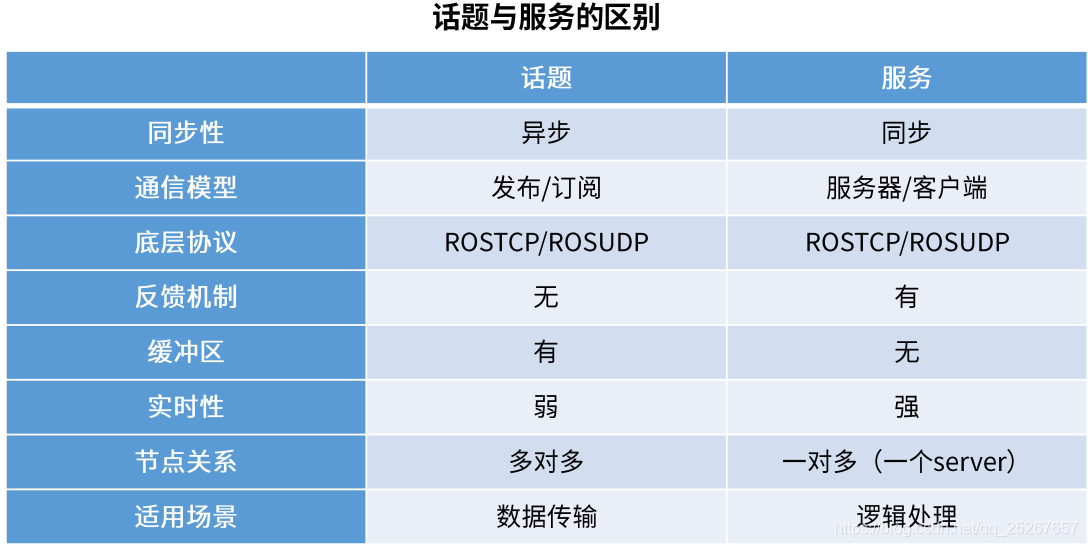
ROS在采用话题通信机制时,会使用一种类型文件来定义消息。借助这些文件,我们能够掌握功能包间的通信接口,便于各节点间信息交换。比如,图像识别节点与显示节点间就是利用特定的消息类型来传输图像数据。
服务种类与信息种类相仿,但主要应用于服务间的交流。它定义了服务请求与回应的格式,使得不同节点间能够实现精确的交流。例如,控制节点向动力节点提出服务请求,动力节点则依照服务种类规定的格式反馈状态信息。
开源社区介绍
ROS开源社区是一个资源充沛的场所,汇集了网站、博客等多种资源。开发者在此可以交流心得、探讨技术,了解行业最新进展。软件源是该社区的核心部分,为开发者提供了众多功能包的下载服务。
在构建个人机器人过程中,若需特定功能模块,我们既可自主编写代码,亦能从软件库中下载他人的模块借鉴。这样做不仅减少了开发周期和成本,还推动了机器人技术的迅速进步。
文件功能说明
ROS系统中包括五个核心目录,其余则是脚本类型的文件。这些脚本文件如同向导,指引系统识别命令程序和软件包的具体位置。当系统需要运行某个目录下的命令时,脚本文件便能够精确地引导系统到达目的地。
安装过程中,功能包的头文件会被保存在一个指定的目录中。如果一个功能包需要引用另一个功能包,它必须包含那个功能包的头文件以建立依赖关系。在开发过程中,我们通常不会在 ROS 的目录中进行操作,而是另外创建一个工作区域,并在那里开发自己的功能包。在构建机器人系统时,大家是否遇到过脚本文件找不到对应文件夹的情况?